
Uncrewed vehicles are simply vehicles that operate without a human operator aboard. They can either be autonomous (see the Terms section below) or remotely operated. There are many different types of uncrewed vehicles that are being used in the sky, on the ground, or in the water. These vehicles serve many different purposes and contribute to research, education, and industry.
How Are They Being Used to Support Coastal Aquaculture?
Aquaculture is one of the fastest growing sectors of food production in the world (5). That growth is in part due to the investment in equipment and technology in the industry. Some of the ways that uncrewed vehicles have already been used to support coastal aquaculture includes:
- Site Planning – gathering data to better inform decisions regarding the environmental feasibility of starting a coastal aquaculture operation at a particular location
- Cage/Net Inspection – detecting flaws in aquaculture cages/nets to proactively mitigate risks associated with a broken cage/net, such as fish escaping or predatory species entering the system
- Environmental Monitoring – keeping track of environmental conditions, such as temperature, salinity, algal concentrations, etc., to predict the health of the organisms and inform if intervention is needed
- Disaster Assessment and Risk Reduction – inspecting an area post-disaster to give insight into how the issue arose and the effects of the disaster
While there are many types of uncrewed vehicles with various purposes, they do share some common goals for their inclusion in the field of aquaculture, such as:
- Safety: There are some inherent safety risks associated with coastal aquaculture such as harsh weather conditions, handling large equipment, and trying to quickly complete a task Uncrewed vehicles allow for the operator to complete tasks remotely, subtracting the risk of collecting data or performing a task manually (8). Note that these vehicles do not eliminate all safety risks as there are hazards associated with the vehicles themselves.
- Efficiency: Many physical tasks in operating a coastal aquaculture business take a substantial amount of time and resources to accomplish. The use of uncrewed vehicles can streamline these processes by eliminating the need to launch a boat or by reducing the number of crew and other resources needed. Many uncrewed vehicles also can collect multiple pieces of data at once.
- Accuracy: Good management decisions rely heavily on the accuracy of the data collected. While accuracy is largely related to the sensors used, there is not very often a spatial (location) element to the data. As opposed to handheld gps units, many of these vehicles can automatically record the location of where data is collected allowing for more precise management practices.
Below, you can see various types of uncrewed vehicles and some of their aquaculture applications.
Uncrewed aerial vehicles (UAVs), whether they are fixed-wing or rotary-wing, are able to provide an overhead perspective of aquaculture sites. Highly automated and precise drone navigation, along with automated image processing and mapping, makes it easier for those who are less experienced or trained on data acquisition and processing tasks, which are typically performed by specialists and/or state and national agencies (1). Current applications include detecting harmful algal blooms (HABs) and equipment inspection (10).
Uncrewed surface vehicles (USVs), like the ones in Figure 2, are becoming convenient and efficient tools for water sampling and sensing of various water quality parameters. These vehicles are also used to conduct bathymetric surveys to determine the layout of the seafloor and to estimate turbidity and suspended sediment concentrations (11, 9).
Uncrewed underwater vehicles (UUVs) are typically classified into two categories: remotely operated vehicles (ROVs) and autonomous underwater vehicles (AUVs). (2). ROVs are typically low-speed, fully actuated box vehicles usually tethered to a controller aboard the boat. They are used primarily to perform inspection and equipment intervention applications (2). ROVs are can be used to clean sea pens that house fish while also inspecting them for any structural or biological compromises (3, 7). AUVs are typically high-speed, torpedo-like vehicles that perform mapping and surveying actions (2). AUVs are being used for environmental monitoring and observing fish behavior in net cage fish farming (4).

Figure 1. Fixed-wing (left) or rotary-wing (right) uncrewed aerial vehicles.
Source: Baam.Tech (left), DJI (right)
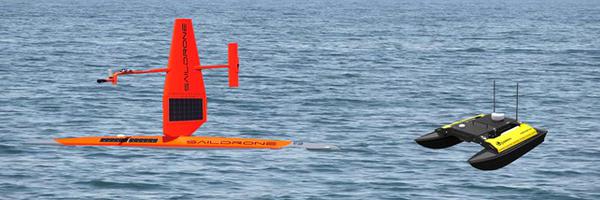
Figure 2. Uncrewed surface vehicles; Saildrone (left) and Clearpath Heron (right).
Source: Saildrone (left), Clearpath Robotics (right)

Figure 3. Uncrewed underwater vehicles include remotely operated vehicles (ROVs, left) and autonomous underwater vehicles, (AUVs, right).
Source: ECA Group (left), Bluefin Robotics (right)
What Kind of Training Is Needed?
While there are currently no regulations on the use of USVs or UUVs, the FAA regulates all civil aviation, including the operation of remotely controlled UAVs. To operate a commercial or research UAV within the regulatory framework, one must obtain their Part 107 certification by the FAA. To learn more visit the FAA's Certificated Remote Pilots including Commercial Operators or review the NC State Extension factsheet Precision Agriculture Technology: How to Become a Commercial Unmanned Aerial Vehicle (UAV) Pilot to get step-by-step instructions on how to become a commercial UAV pilot, along with best management practices. There are also several online resources and Youtube videos to help you pass the Part 107 certification exam and learn more about the operation of a specific vehicle.
Conclusion
The inclusion of uncrewed vehicles in aquaculture is benefiting the industry by increasing the efficiency, safety, and accuracy of data collection and system monitoring in various coastal aquaculture operations. They have many applications including site planning, equipment inspection, environmental monitoring, and disaster assessment. While these emergent technologies are new to aquaculture, they are valuable in risk reduction and system optimization.
Terms*
Autonomous (6): having the ability to gather information and execute an action without/limited human intervention
FAA: Federal Aviation Association
UAV: Uncrewed aerial vehicle
USV: Uncrewed surface vehicle
UUV: Uncrewed underwater vehicle
*you may see slight variations of these terms in written literature
References
1. Aguilar-Manjarrez, J., Wickliffe, L. C., & Dean, A. (Eds.). (2018). Guidance on spatial technologies for disaster risk management in aquaculture.
2. Breivik, M., & Fossen, T. I. (2009). Guidance laws for autonomous underwater vehicles. Underwater vehicles, 51-76.
3. Chalkiadakis, V., Papandroulakis, N., Livanos, G., Moirogiorgou, K., Giakos, G., & Zervakis, M. (2017, October). Designing a small-sized autonomous underwater vehicle architecture for regular periodic fish-cage net inspection. In 2017 IEEE International Conference on Imaging Systems and Techniques (IST) (pp. 1-6). IEEE.
4. Karimanzira, D., Jacobi, M., Pfützenreuter, T., Rauschenbach, T., Eichhorn, M., Taubert, R., & Ament, C. (2014). First testing of an AUV mission planning and guidance system for water quality monitoring and fish behavior observation in net cage fish farming. Information Processing in Agriculture, 1(2), 131-140.
5. Plus, F. F. (2016). Fisheries and Aquaculture Department, Food and Agriculture Organization of the United Nations. Rome.
6. Salem, M. (2019, October 18). What is an Autonomous System?
7. Solem, A. J. L. (2017). Analysis of current ROV Operations in the Norwegian Aquaculture-Reducing Risk in exposed Aquaculture Operations (Master’s thesis, NTNU).
8. Utne, I. B., Schjølberg, I., & Holmen, I. M. (2015). Reducing risk in aquaculture by implementing autonomous systems and integrated operations. In European Safety and Reliability Conference (ESREL).
9. Wilkens, J. L., McQueen, A. D., & Suedel, B. C. Estimating Turbidity and Suspended Sediment Concentrations Using an Unmanned Surface Vehicle.
10. Wu, D., Li, R., Zhang, F., & Liu, J. (2019). A review on drone-based harmful algae blooms monitoring. Environmental monitoring and assessment, 191(4), 211.
11. Young, S., Peschel, J., Penny, G., Thompson, S., & Srinivasan, V. (2017). Robot-assisted measurement for hydrologic understanding in data sparse regions. Water, 9(7), 494.
Publication date: Oct. 29, 2020
N.C. Cooperative Extension prohibits discrimination and harassment regardless of age, color, disability, family and marital status, gender identity, national origin, political beliefs, race, religion, sex (including pregnancy), sexual orientation and veteran status.
